Raspberry pi and Arduino based mobile robot.
Remote controlArduinoRaspberry Pi
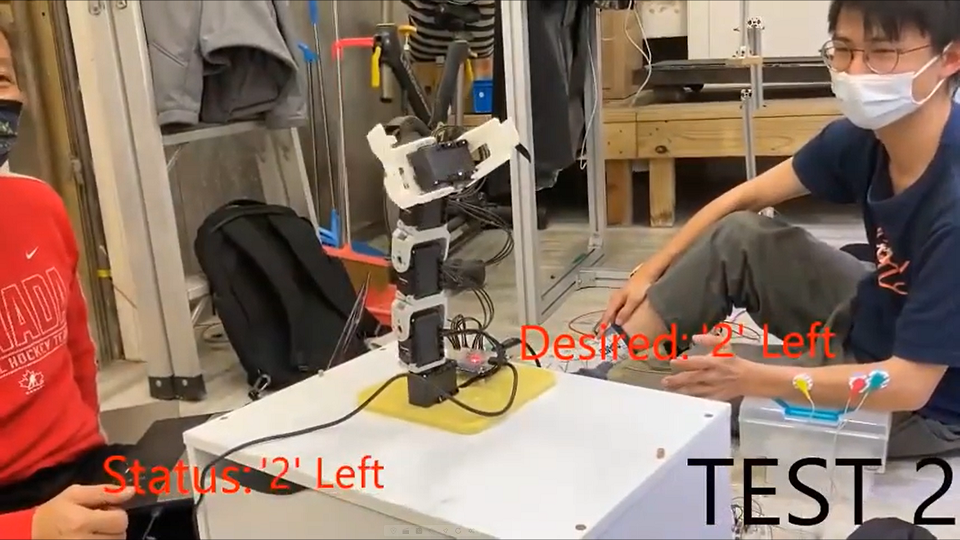
Using an SVM classifier that recognizes filter-conditioned EMG pattern to control a 5 DoF manipulator.
EMG signal processingManipulatorML
Visualization of the KITTI dataset in ROS.
Self-driving carsVisualizationROS
Implement Kalman Filter in MATLAB and Simulink.
System control
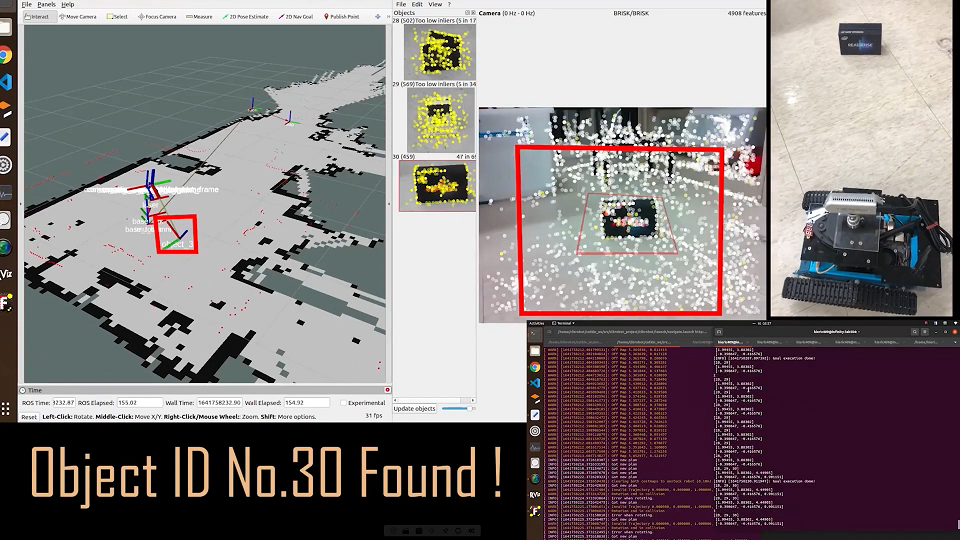
MLF6110 is a self-navigated object searching robot implementing BRISK algorithm and Gmapping.
SLAMBRISKROSMobile platform
Using Stable Baseline3 library to solve 2 environment.
Reinforcement LearningML
Stable Diffusion.
MLAI Generated Content
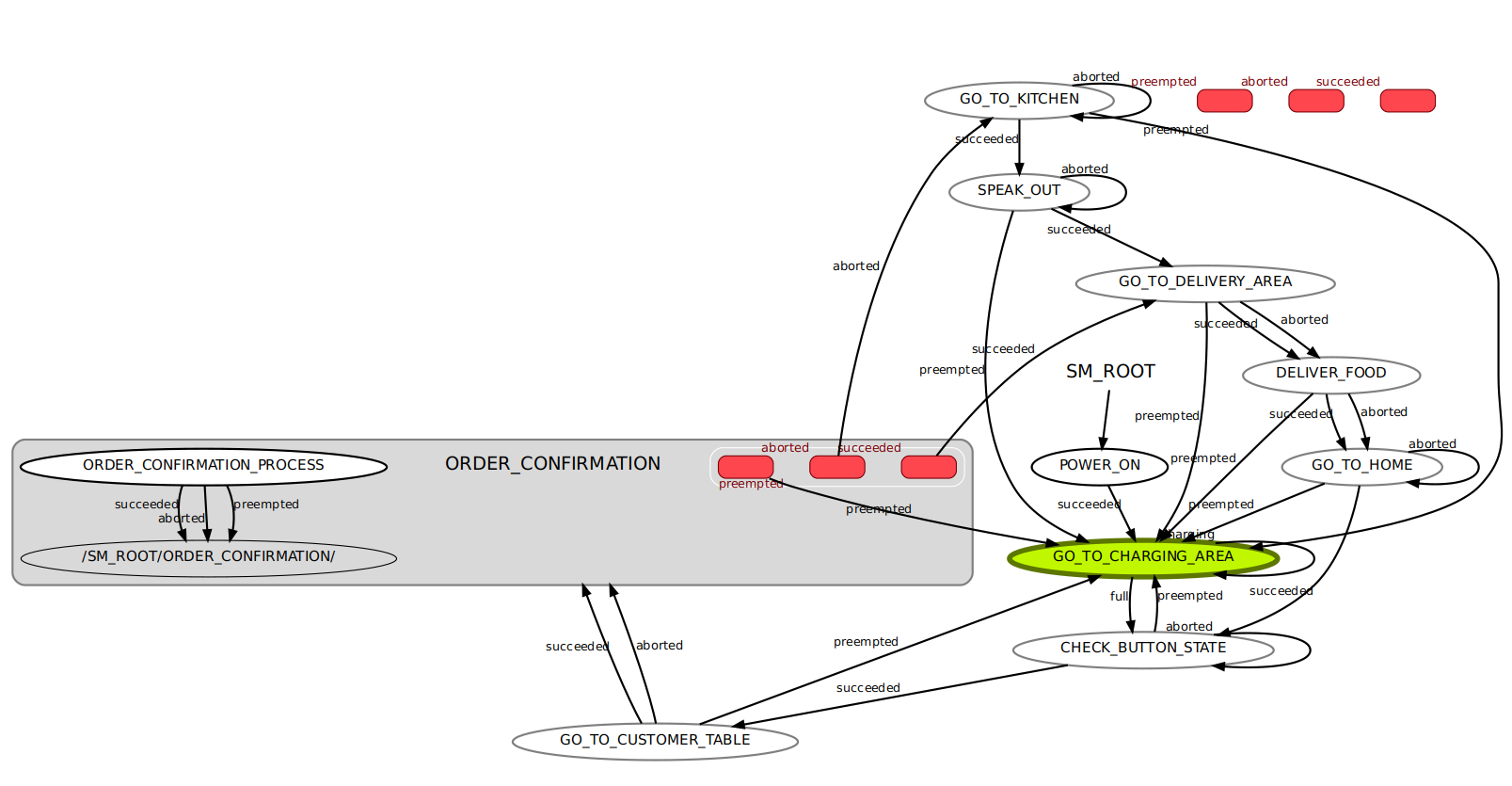
A ROS application using Smach implement state machine for an analogy.
ROSActionlibSMACHFinite State Machine
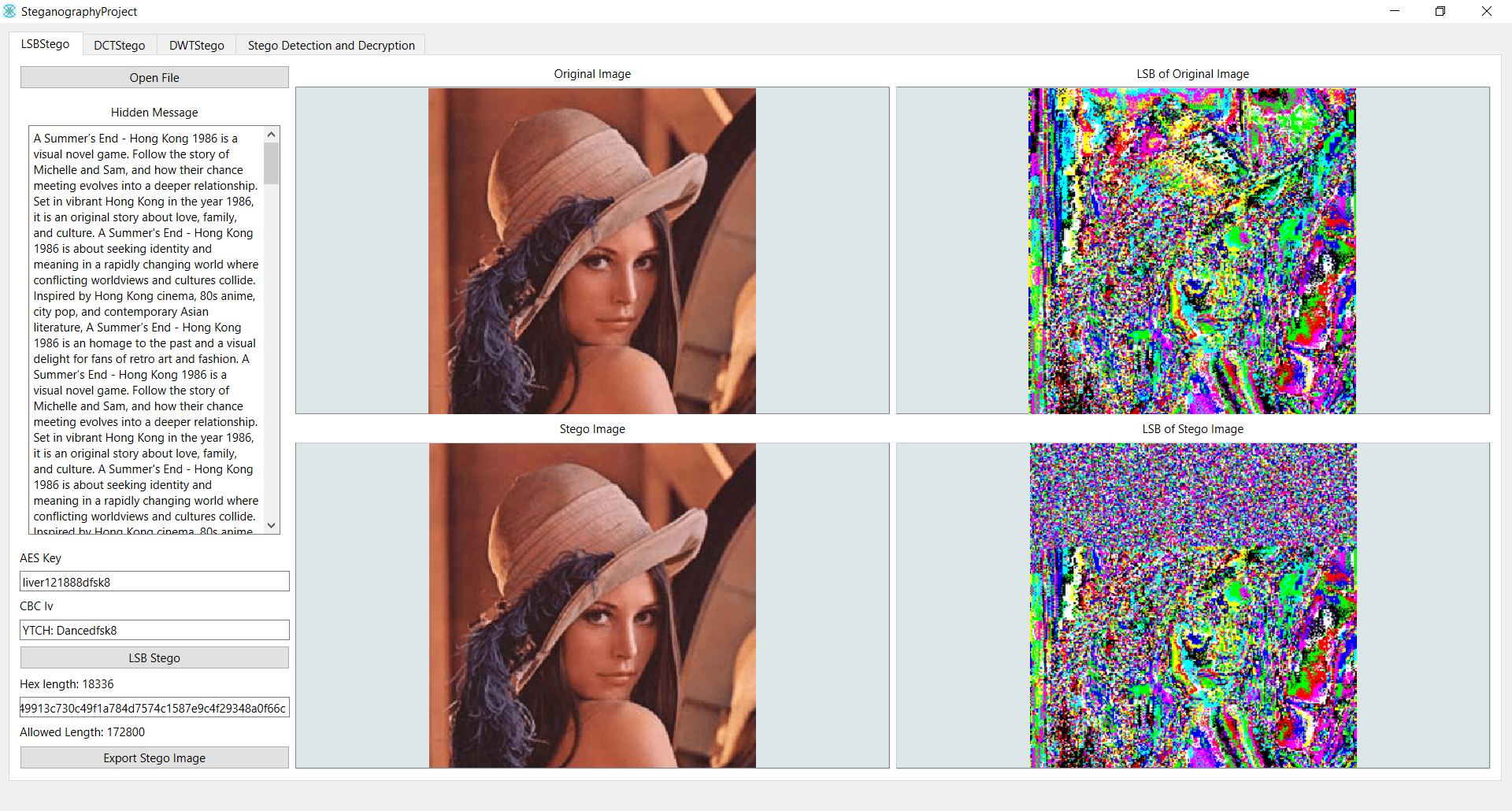
A Qt application using AES128 implementing DCT, DWT, LSB steganography.
CryptologyDCTDWT